Fault Tolerance
Table of contents
Fault Tolerance
Dependability
- Requirements related to dependability
- Availability : Readiness of usage
- Reliability : Continuity of service delivery
- Maintainability : How easy to be repaired
-
Reliability vs Availability (신뢰성 vs 유효성)
- Reliability : R(t)
- MTTF : mean time to failure ( 1 - crashtime/totaltime )
- MTTR : mean time to repair ( crashtime/totaltime )
- MTBF : mean time between failure ( simply (MTTF + MTTR) )
-
Availability : A(t)
-
average fraction of time that C has been up and running in interval [0,t)
-
Reliability and availability make sence only if we have an accurate notion of what a failure is
-
- Reliability : R(t)
-
주요 Term 정리
-
Failure : A component is not living up to its specifications
ex) crashed program
-
Error : Part of a component that can lead to a failure
ex) programming bug
-
Fault : Cause of an error
ex) sloppy programmer
-
-
Handling faults
-
Fault Prevention (장애 예방) : Prevent the occurrence of a fault (오류 발생 방지)
ex) Don’t hire sloppy programmers
-
Fault Tolerance (결함 허용) : Build a component such that it can mask the occurrence of a fault
(결함 발생을 은폐할 수 있는 구성요소 구축)
ex) Bulid each component by two independent programmers
-
Fault Removal (결함 제거) : Reduce the presence, number, or seriousness of a fault
결함의 존재, 수 또는 심각성을 줄입니다
ex) Get rid of sloppy programmers
-
Fault Forecasting (오류 예측) : Estimate current presence, future incidence, and consequences of faults (현재 존재하는, 미래의 발생률, 결함의 결과들을 추정)
ex) Estimate how a recruiter is doing when it comse to hiring sloppy programmers
-
-
Failure Models Types of Failure
- Crash failure : Halts but is working correctly until it halts (중지될 때까지 올바르게 작동함)
- Omission failure : Fails to respond to incoming requests (들어오는 request에 응답 실패)
- Receive omission : Fails to receive incoming messages (들어오는 메시지 수신 실패)
- Send omission : Fails to send messages (메시지 전송 실패)
-
Timing failure (Performance failure) : Response lies outside a specified time interval
(응답이 지정된 시간 간격을 벗어남 - 너무 느림)
- Response failure : Response is incorrect (부정확한 응답)
- Value failure : The value of the response is wrong (응닶 값이 잘못됨)
- State-transition failure : Deviates from the correct flow of control (올바른 제어 흐름에서 벗어남)
-
Arbitrary failure : May produce arbitrary responses at arbitrary times
(임의의 시간에 임의의 응답을 생성할 수 없음 = ㅈ버그) Crash failure are the least severe, Arbitrary failure are the worst!
- Dependability (믿을 수 있는) vs Security (보안)
- Omission vs Commision (누락 / 잘못 부과)
- Omission failure : A component fails to take an action that it should have taken (구성요소가 취했어야 했는 조치를 취하지 못함)
- Commision failure : A component takes an action that is should not have taken (구성요소가 수행해서는 안되는 작업을 수행 함)
- deliberate failure (의도적 실패) = typically considered security problems (일반적으로 보안문제)
- Distinguishing between deliberate failure and unintentional ones is impossible (고의적인 실패와 의도하지 않은 실패를 구별하는 것은 불가능합니다)
- Halting Failures = Crash failure
- Distinguishing between crash or omission/timing failure may be impossible
- Halting failure in Asynchronous sys
- Cannot reliably detect crash failures (충돌실패를 안정적으로 감지할 수 없음)
- Halting failure in Synchronous sys
- Can reliably detect omission and timing failures (누락 및 타이밍 실패를 안정적으로 감지할 수 있음)
- Why? : async sys는 실행속도, 전달시간에 대한 가정이 없지만, sync sys는 실행속도와 전달시간이 제한 되어 있기 때문
- Halting Failure 가 발생하는 Case에 따른 구분 (가정)
- Stop : crash failures, but reliably detectable
- Noisy : crash failures, eventually reliably detectable (실패를 결국 알아차릴 수 있음)
- Slient : omission or crash failures, clients cannot tell what went wrong
- Safe : Arbitrary, yet benign failures → they cannot do any harm
- Arbitrary : Arbitrary, with malicious failures (임의적, 악의가 있음)
Redundancy
- Redundancy for Failure Masking (장애 마스킹을 위한 이중화)
- 어떤것을 redundancy하느냐에 따른 구분
- Information redundancy
- Add extra bits to data
- Time redundancy
- Can be performed again if anything went wrong
- Typically used when faults are transient or intermittent (오류가 일시적, 간헐적일때)
- Physical redundancy
- Add equipment or processes
- This type is extensively used in distributed system (분산sys에서 광범위하게 사용됨)
- Information redundancy
- Process Resilience (프로세스 탄력성)
- replication을 통해 malfuctioning(오작동) process에서 process protect
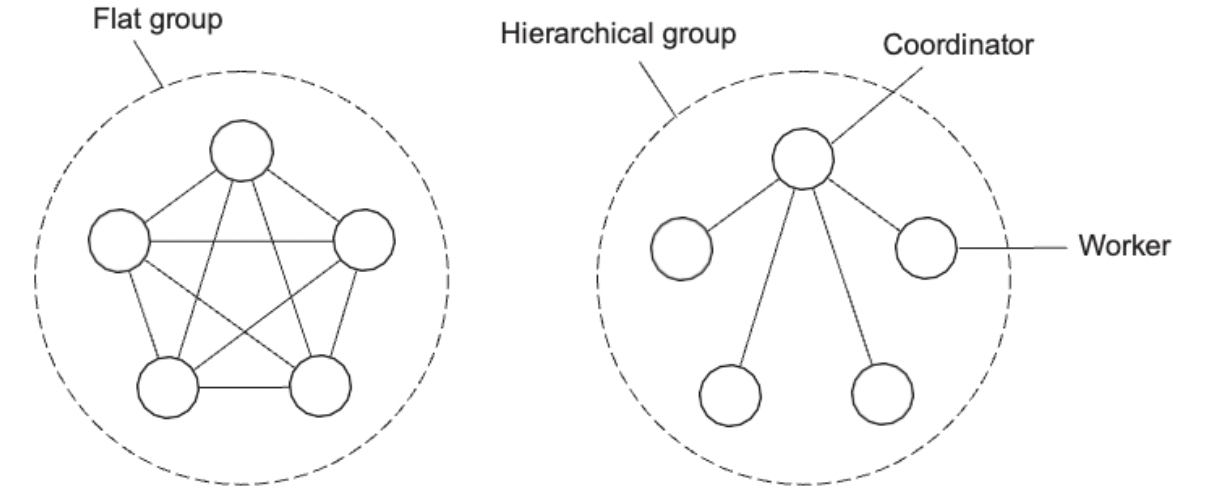
- Flat groups vs Hierarchical group
- Flat group : more overhead 가능
- Hierarchical group : Not fault tolerant and scalable(장애허용과 확장성은 불가) but easly to implement(구현이 쉽다)
Groups and Failure Masking (그룹 및 장애 마스킹)
- k-fault tolerant group (k 장애 허용 그룹) : k member failures
- Halting failure 가 허용되려면 : 실패 = K, 성공 = K+1
- Arbitrary failure 가 혀용되려면 : 실패 = K, 성공 = 2K+1
-
Important assumptions
- All members are identical
- All members process commands in same order
-
가정1, 가정2 만족시, then, we can now be sure that all processes exactly do the same thing
(모든 프로세스가 정확히 동일한 작업을(정상작동)하는지 확인할 수 있습니다)
Arbitrary failure 허용 가능하려면 총 3K+1개의 group members가 필요하다.
-
Byzantine Failures
- Byzantine agreement의 requirements
- BA1 : Every non-faulty back up process stores the same value
- BA2 : If the primary is non-faulty, then every non-faulty back up process stores exactly what the primary had sent
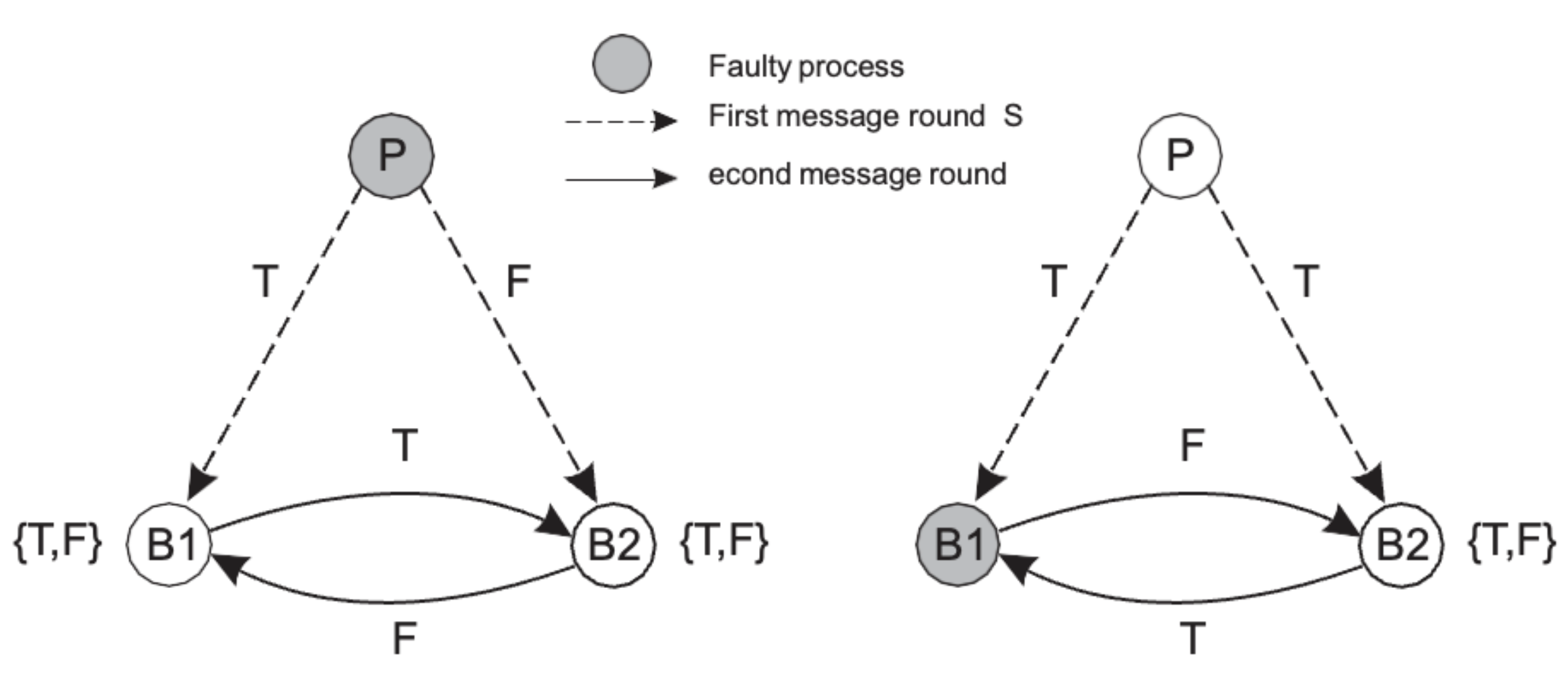 (3K member로 불충분한 상황 예시)
(3K member로 불충분한 상황 예시) 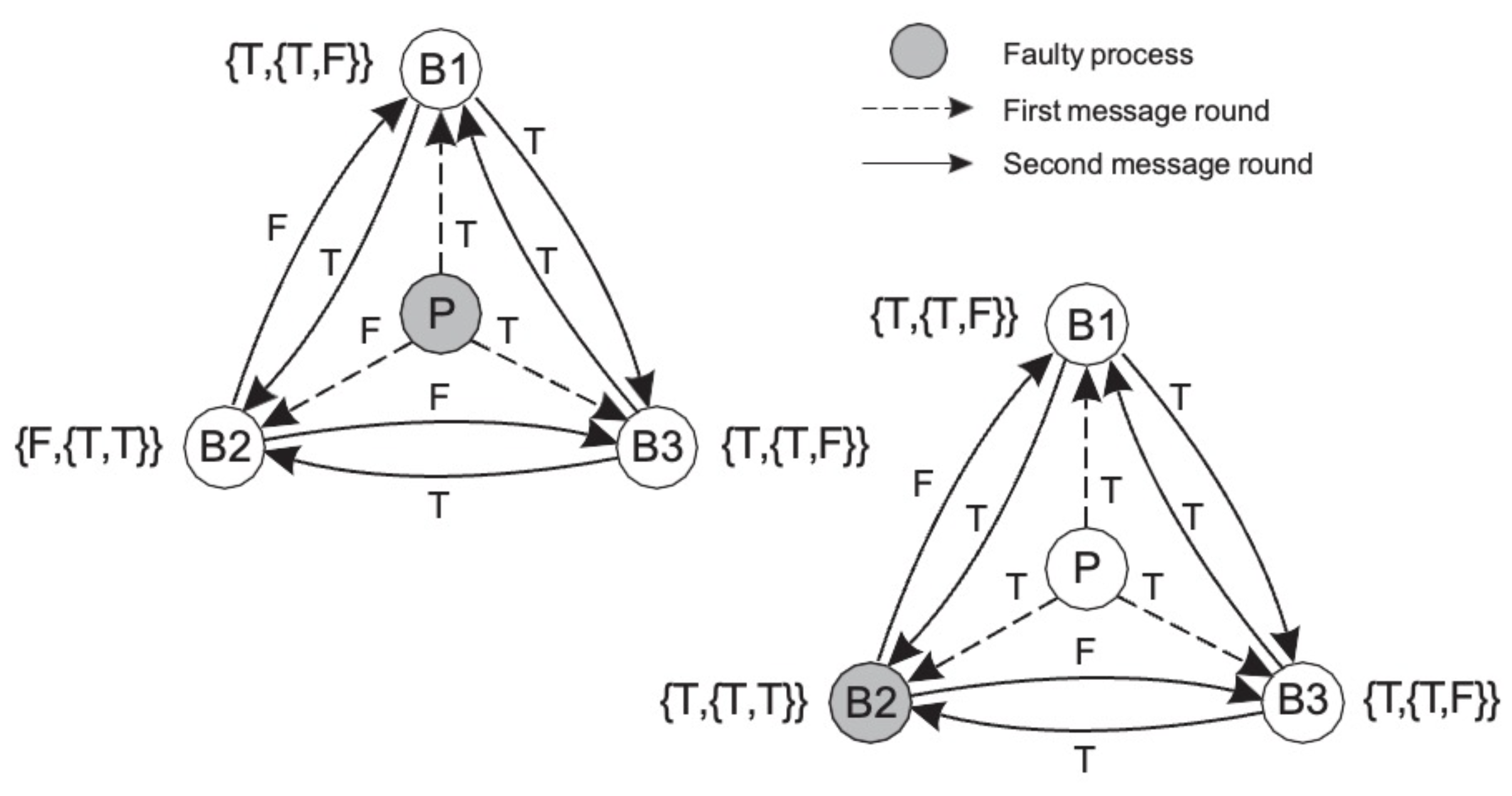
(3K+1 member로 충분한 상황 예시)
- Byzantine agreement의 requirements
- Consensus (의견일치, 합의)
- Prerequisite (전제조건) : non faulty process executes the same commands and in same order as every other non-faulty process
- Reformulation (재정의, 재편성) : non faulty group members need to reach consensus on which command to execute next (결함이 없는 그룹멤버들은 다음에 실행할 명령에 대한 합의를 해야한다)
-
Consensus 방법 1 : Flooding-based Consensus
- 모든 프로세스로 부터 command 집합을 다 받아서 가지고있는 프로세스가 결정을 내린다
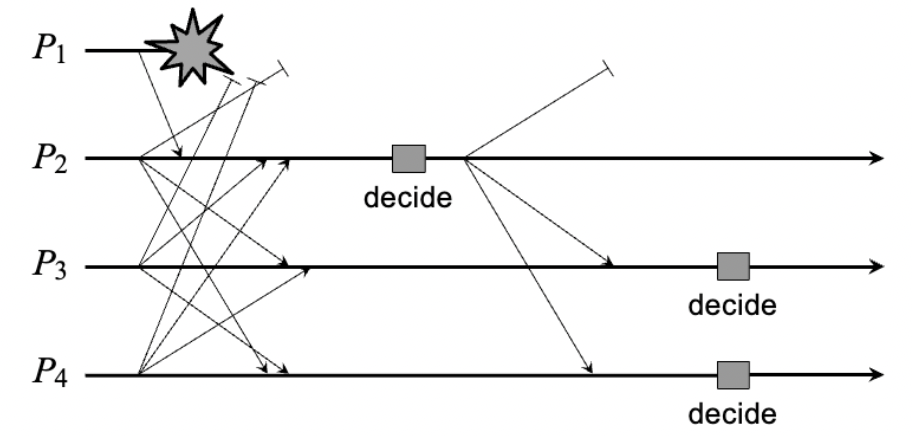
- 모든 프로세스로 부터 command 집합을 다 받아서 가지고있는 프로세스가 결정을 내린다
- Realistic Consensus : Paxos, Raft
Failure Detection
How can we reliably detect that a process has actually crashed?
프로세스가 실제로 충돌했음을 어떻게 확실하게 감지할 수 있을까?
- 일반적인 방법
- Each process is equipped with a failure detection module
- A process P probes another process Q for a reaction
- If Q reacts, Q is considered to be alive (by P)
- If Q does not react with t time units, Q is suspected to have crashed (프로세스에 장애 감지 모듈이 장착되어 있음) (P는 Q의 반응을 조사한다) (Q가 반응할 시 Q는 살아있다) (Q가 단위시간 t동안 반응하지 않는다면 Q는 충돌한 것으로 의심된다)
- Practical implementation (실제 구현)
- If P did not receive heartbeat from Q within time t, P suspects Q
- If Q later sends a message (whish is received by P)
- P stops suspecting Q
- P increases the timeout value t
- If Q did crash, P will keep suspecting Q
-
Reliable Remote Procedure Calls
- What can go wrong?
- the client is unable to locate the server (클라이언트가 서버를 찾을 수 없음)
- the request message from the client to the server is lost (클라이언트에서 서버로의 요청메시지가 손실됨)
- the server crashes after receiving a request (요청을 받은 후 서버가 충돌함)
- the reply message from the server to the client is lost (서버에서 클라이언트로의 응답 메시지가 손실됨)
- the client crashes after sending a request (요청을 보낸 후 클라이언트가 충돌합니다)
- Two easy solution (문제가 생길 시 두가지 쉬운 해결책)
- cannot locate server → just report back to client (클라이언트에 다시 보고한다)
- request was lost → just resend message (메시지를 다시 보낸다)
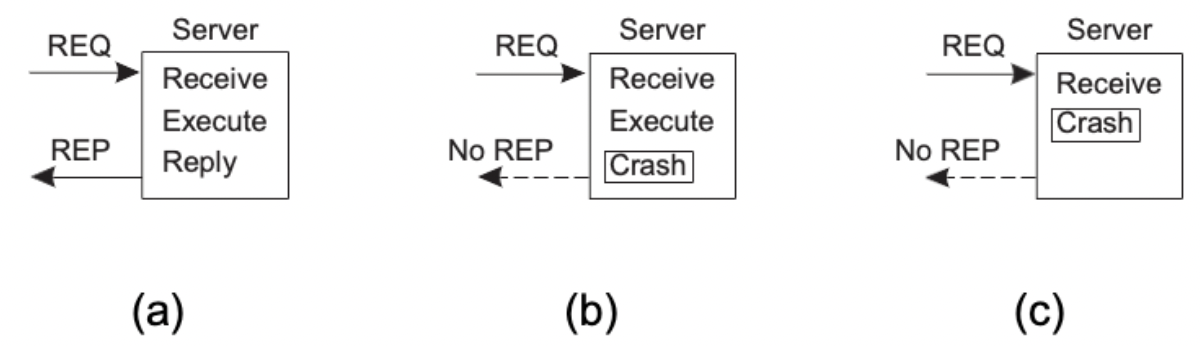 (a) : 정상 (b) : the server crashes after receiving a request and execute (c) : the server crashes after receiving a request
(a) : 정상 (b) : the server crashes after receiving a request and execute (c) : the server crashes after receiving a request
- What can go wrong?
-
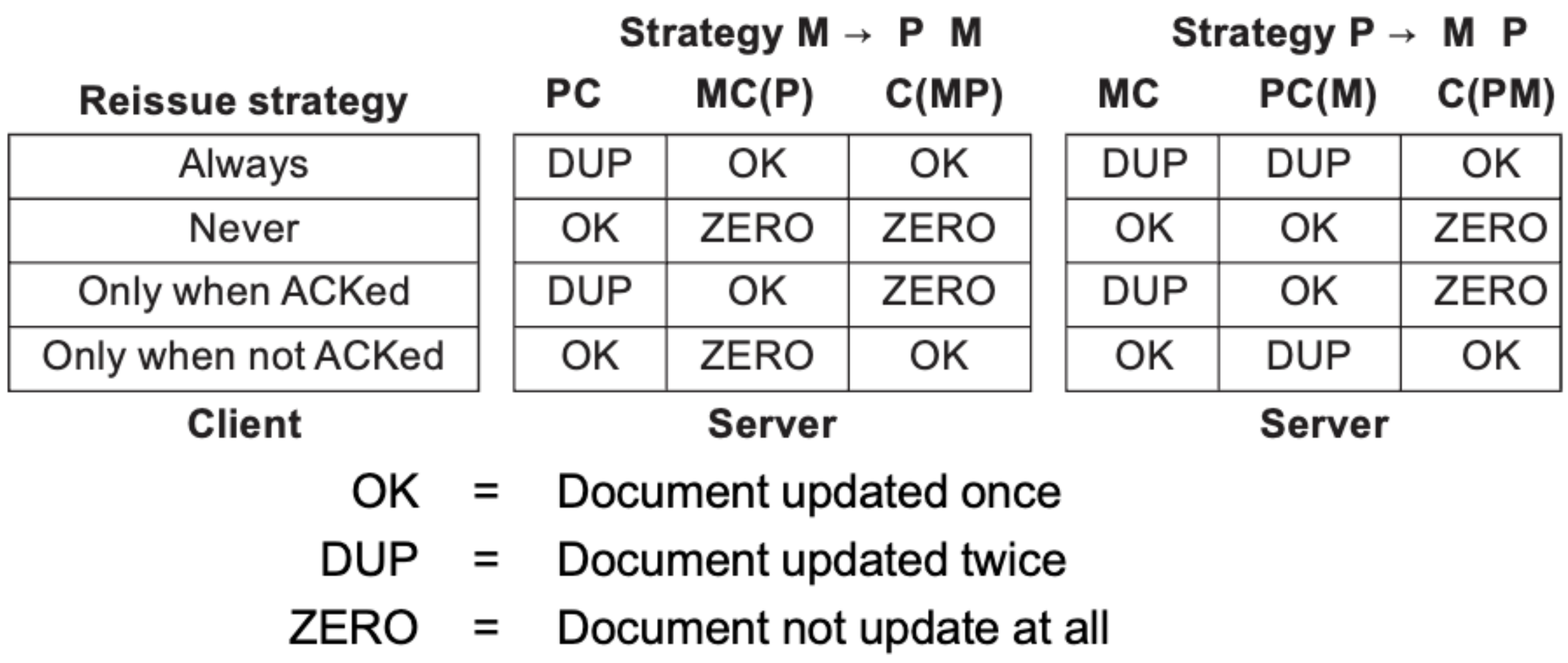
Why Fully Transparent Server Recovery Is Impossible? 서버 복구의 완전한 투명성은 왜 불가능한가?
- three types of events at the server 서버에서 발생하는 3가지 유형의 이벤트 (서버가 문서를 업데이트했다고 가정한다)
- M : Send the completion message (완료 메시지 본내기 = 보고 = report)
- P : Complete the processing of the document (문서 처리 완료 = update)
- C : Crash (충돌)
- Six possible orderings (6가지 가능한 순서)
- M → P → C : crash after reporting completion
- M → C (→ P) : crash after reporting completion, but before the update
- P → M → C : crash after reporting completion, and after update
- P → C (→ M) : update took place, and then crash (no report)
- C (→ P → M) : crash before doing anything
- C (→ M → P) : crash before doing anything
- three types of events at the server 서버에서 발생하는 3가지 유형의 이벤트 (서버가 문서를 업데이트했다고 가정한다)
- Reliable RPC 에서 Lost Reply Messages (손실된 응답 메시지) 에 대한 문제
- client는 응답을 받지 못한다
- 그러나 이것이 lost request or crahsed server or lost response를 결정할 수 없다.
- Partial Solution
- Design the server such that its operations are idempotent(멱등적) (서버의 설계를 멱등적이게 한다)
- repeating the same operation is the same as carrying it out exactly once (같은 작업의 반복은 정확히 한번 하는것과 같다 (같은 결과이다))
- However many operations are inherently non-idempotent, such as many banking transactions (그러나 많은 은행거래와 같이 많은 작업은 본질적으로 멱등적이지 않다)
- Reliable RPC 에서 Client Crash
- the server is doing work and holding resources for nothing (called orphan computation) (client가 server로 task를 주고 client가 죽으면 server는 쓸데없는 일을 하는것. 이때의 일을 고아 계산이라 함)
- Solution
- Orphan is killed by the client when it recovers
- Client broadcasts new epoch number when recovering → server kills client’s orphans
- Require computations to complete in a T time units
- T : expected time T를 넘기면 죽인다
- Old ones are simply removed
- Distributed Commit Protocols
- Two-phase commit
- Three-phase commit
-
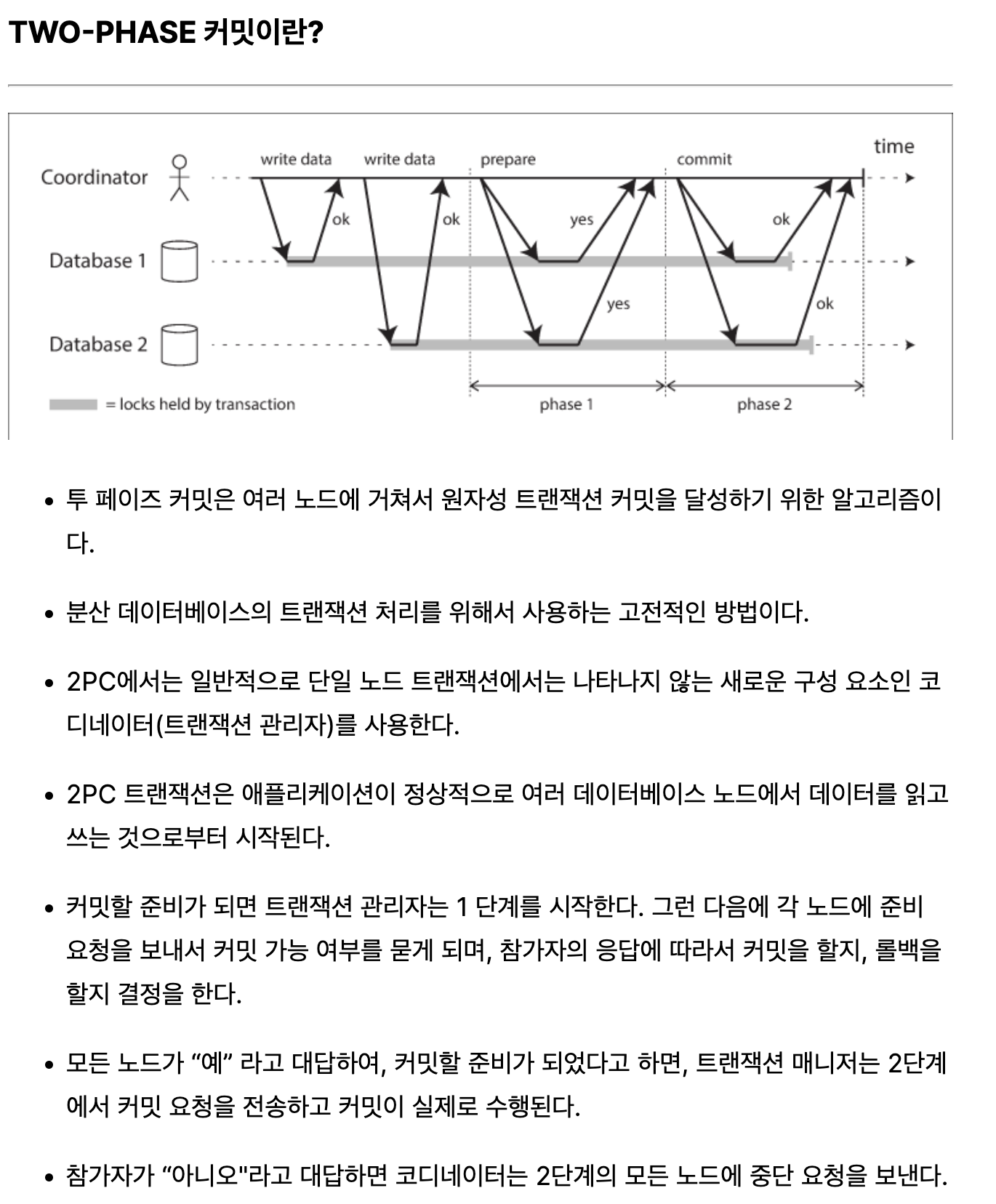
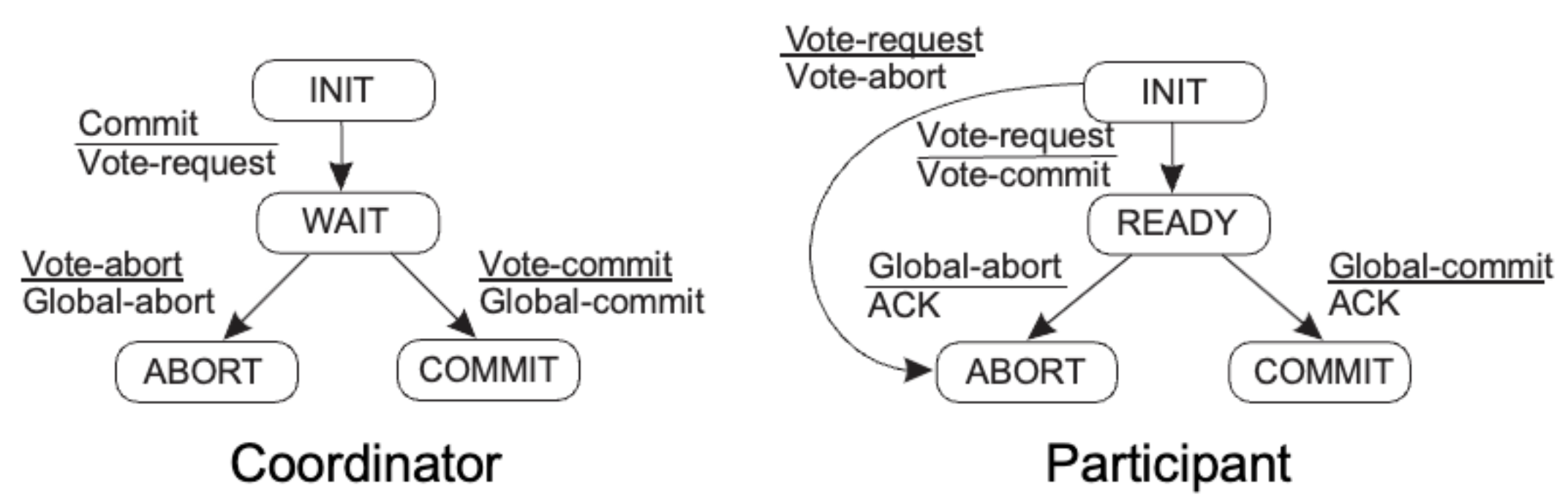
Two-phase Commit Protocol (2PC)
- Phase 1a: Coordinator sends VOTE-REQUEST to participants (also called a pre-write)
- Phase 1b: When participant receives VOTE-REQUEST, it returns either VOTE-COMMIT or VOTE-ABORT to coordinator If it sends VOTE-ABORT, it aborts its local computation
- Phase 2a: Coordinator collects all votes; if all are VOTE-COMMIT, it sends GLOBAL-COMMIT to all participants Otherwise, it sends GLOBAL-ABORT
- Phase 2b: Each participant waits for GLOBAL-COMMIT or GLOBAL-ABORT and handles accordingly
-
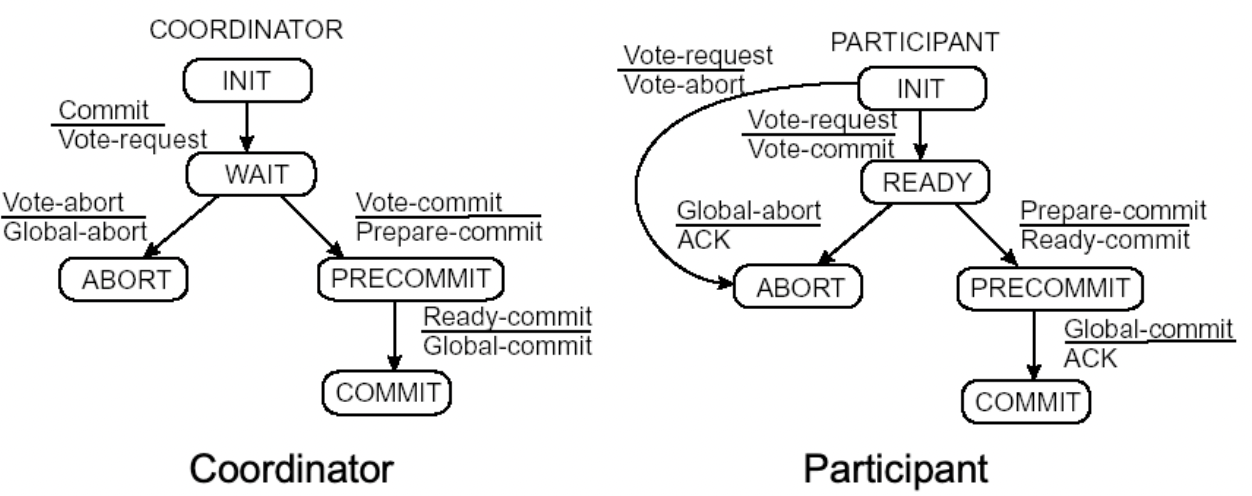
Three-phase Commit Protocol (3PC)
- Phase 1a: Coordinator sends VOTE_REQUEST to participants
- Phase 1b: When participant receives VOTE_REQUEST, it returns either VOTE_COMMIT or VOTE_ABORT If it sends VOTE_ABORT, it aborts its local computation
- Phase 2a: Coordinator collects all votes; if all are VOTE_COMMIT, it sends PREPARE_COMMIT to all participants Otherwise, it sends GLOBAL_ABORT and halts
- Phase 2b: Each participant waits for PREPARE_COMMIT, or waits for GLOBAL_ABORT after which it halts
- Phase 3a: (Prepare to commit) Coordinator waits until all participants have ACKed receipt of PREPARE_COMMIT message, and then sends GLOBAL_COMMIT to all
- Phase 3b: (Prepare to commit) Participant waits for GLOBAL_COMMIT and handles accordingly
- Recovery
- when failure occurs, we need to bring the system into an error-free state
- 장애가 발생하면 시스템을 오류가 없는 상태로 만들어야 함
- 방법 2가지
- Forward error recovery
-
- Backward error recovery
- bring the system back into a previous error -free state : 에러없던 이전상태로 되돌림 Use backward error recovery, requiring that we establish recovery points : 역방향 오류 복구를 사용하여 되돌릴 복구지점을 설정해야 한다.
- 방법 2가지
-
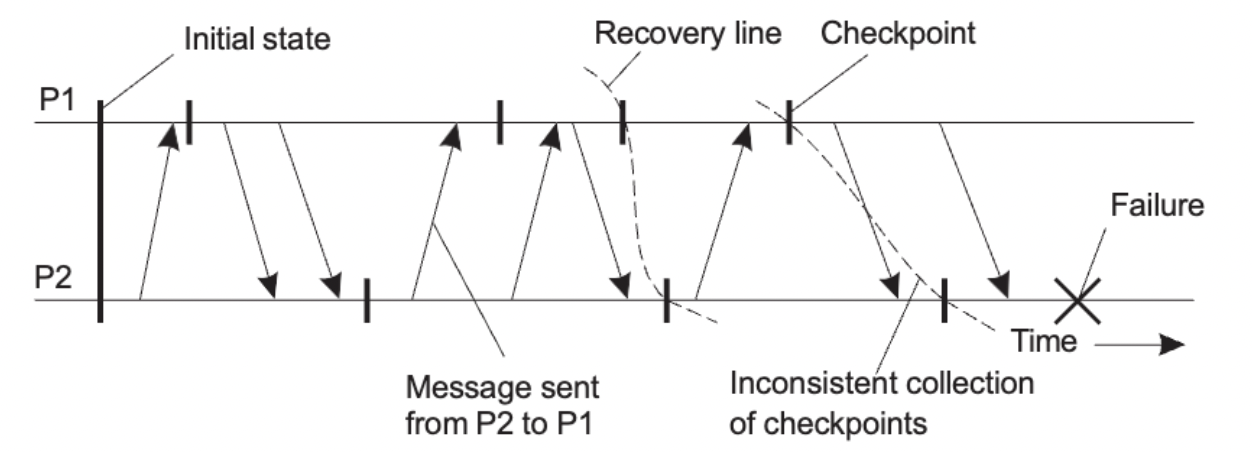
Recovery line
-
Independent Check pointing
- each process independently takes checkpoints
- Upon a failure, work backwards to locate a consistent cut (실패 시 거꾸로 작업하여 일관된 것을 찾습니다)
- if checkpointing is done at the wrong instance : 체크포인트가 잘못된 순간에 수행되면 the recovery line may lie at system stratup time : 복구라인이 시스템 시작시간에 놓일 수 있다. → Cascaded Rollback (= Domino effect)
- Coordinated Checkpointing
- each process takes a checkpoint after a globally coordinated action 각 프로세스들은 전역적인 동기화 작업 이후에 체크포인트를 가진다
- Simple Solution
- Use a two-phase blocking protocol 2단계 차단 프로토콜 사용
- A coordinator multicasts a checkpoint request message
- When a participant receives such a message, it takes a checkpoint, stops sending (application) message, and reports back that it has taken a checkpoint 참가자는 이러한 메시지를 수신하면 체크포인트를 받고, 메시지 전송을 중단한다. 그리고 체크포인트를 받았음을 보고한다
- When all checkpoints have been confirmed at the coordinator, the latter broadcasts a checkpoint done message to allow all processes to continue 코디네이터에서 모든 체크포인트가 확인되면 코디네이터는 모든 프로세스가 계속 할 수 있도록 체크포인트 완료 메시지를 브로드캐스트한다.
- It is possible to consider only those processes that depend on the recovery of the coordinator, and ignore the rest
- Use a two-phase blocking protocol 2단계 차단 프로토콜 사용
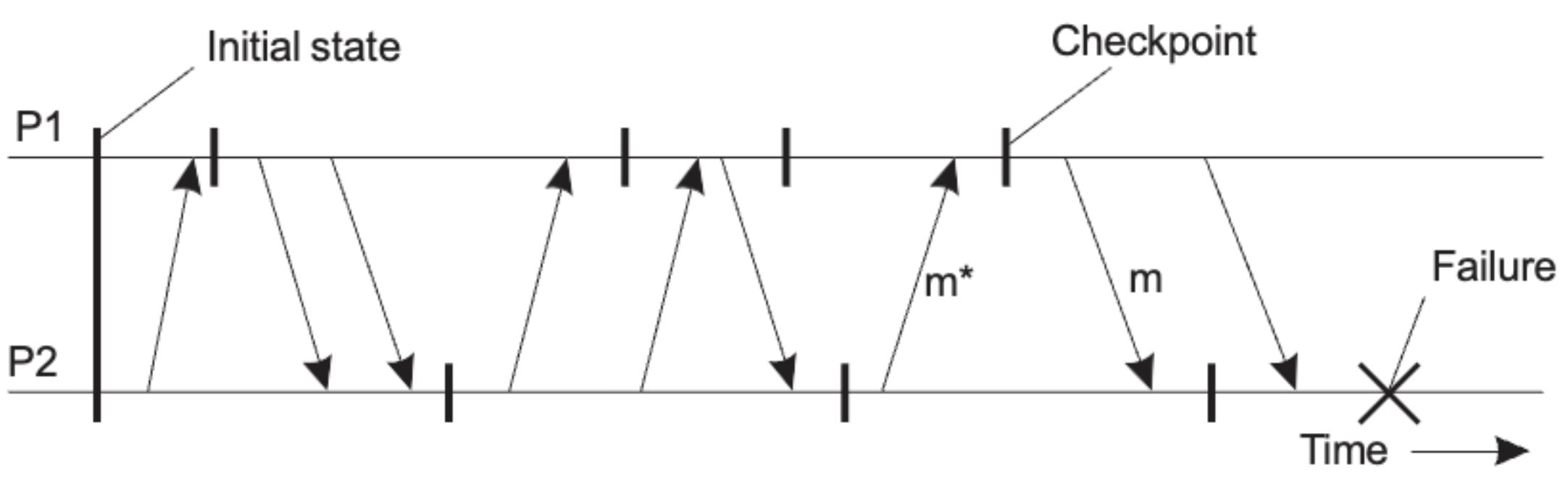
- Message Logging
- checkpoint is expensive, instead of checkpoint, try to replay from the most recent checkpoint → store messages in a log 비싼 체크포인트를 사용하는 대신, 가장 최근 체크포인트에서 동작 재생을 시도하라. 그러기 위해서는 메시지들을 log에 저장해두어야 한다 → message logging
- The execution of each process can be considered as a sequence of state intervals
- Each state interval starts with a non-deterministic event (e.g., message receipt)
- Execution in a state interval is deterministic
- checkpoint is expensive, instead of checkpoint, try to replay from the most recent checkpoint → store messages in a log 비싼 체크포인트를 사용하는 대신, 가장 최근 체크포인트에서 동작 재생을 시도하라. 그러기 위해서는 메시지들을 log에 저장해두어야 한다 → message logging
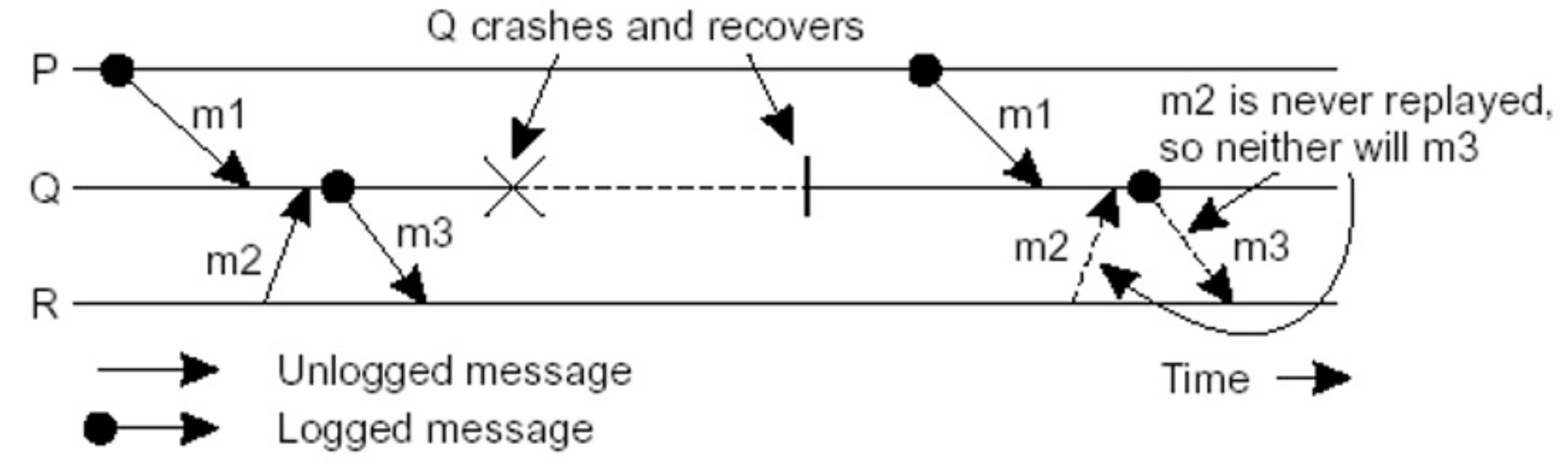
- Message Logging and Consistency message 기록은 언제해야하는가?
- Process Q has just received and subsequently delivered messages m1 and m2
- After delivering m1 and m2, Q sends message m3 to process R
- Process Rreceives and subsequently delivers m3
- 만약, m2를 기록하지 않는다면?
- Message-logging Schemes 메시지 로깅 체계
- Notations 표기법
- DEP(m) : m 이 전달된 프로세스
- COPY(m) : m의 복사본이 있지만 아직 안정적으로 저장하지 않은 프로세스
- FAIL : 충돌한 프로세스 모음
- Pessimistic protocol 비관적 프로토콜
-
각각의 불안정한 메시지 m에 대해 m에 의존하는 최대 하나의 프로세스, 즉 DEP(m) ≤ 1 이다. - 비관적 프로토콜의 불안정한 메시지는 다음 메시지를 보내기 전에 안정되어야 한다.
-
- Optimistic protocol 낙관적 프로토콜
- 각각의 불안정한 메시지 m에 대해 COPY(m) ⊆ FAIL인 경우 결국에는 DEP(m)⊆ FAIL도 확인한다.
- DEP(m)⊆ FAIL을 보장하기 위해서는 일반적으로 고아 프로세스 Q를 Q !⊆ DEP(m) 까지 롤백한다.
- Notations 표기법